Our Goal
Our goal is to help young kids practice writing numbers. We have developed a robot that will physically trace out numbers writeen on a mobile device to give kids a fun, interactive learning experience.
Background
The focus topic of our project is centered around educational technology. Within the field of educational technology, we wanted to specifically work with kids of a younger age, between 2-5 years. The design we had developed is at its core a fun spelling simulation that will teach children how to spell words and write letters. While this design can be used as a fun learning tool for spelling, our main motivation behind developing this tool is to assist children with dyslexia. Dyslexia is a commonly known language learning disability, totaling to approximately 15% of the US population (cite). When a child has dyslexia, the child often has difficulty learning how to spell words and often inverse the letters they spell, in which "dog" becomes "bog" and "up" becomes "uq" (cite). There are currently techniques to help children with dyslexia overcome this obstacle, often by having alphabetical games and or tracing activities. Our design builds off these techniques through enhancing the experience, adding a fun and "magical" twist.
Dyslexia is a commonly known language learning disability, totaling to approximately 15% of the US population.
Design
To engage with the robot, the kids can trace a number on an app to control how the robot will move. We built a sample app to control how the robot will move without full drawing function. Users with final App will be prompted by a dotted line to follow as they trace the number. Kids also can use our happy black as a digital drawing tool to free drawing anything they prefer.

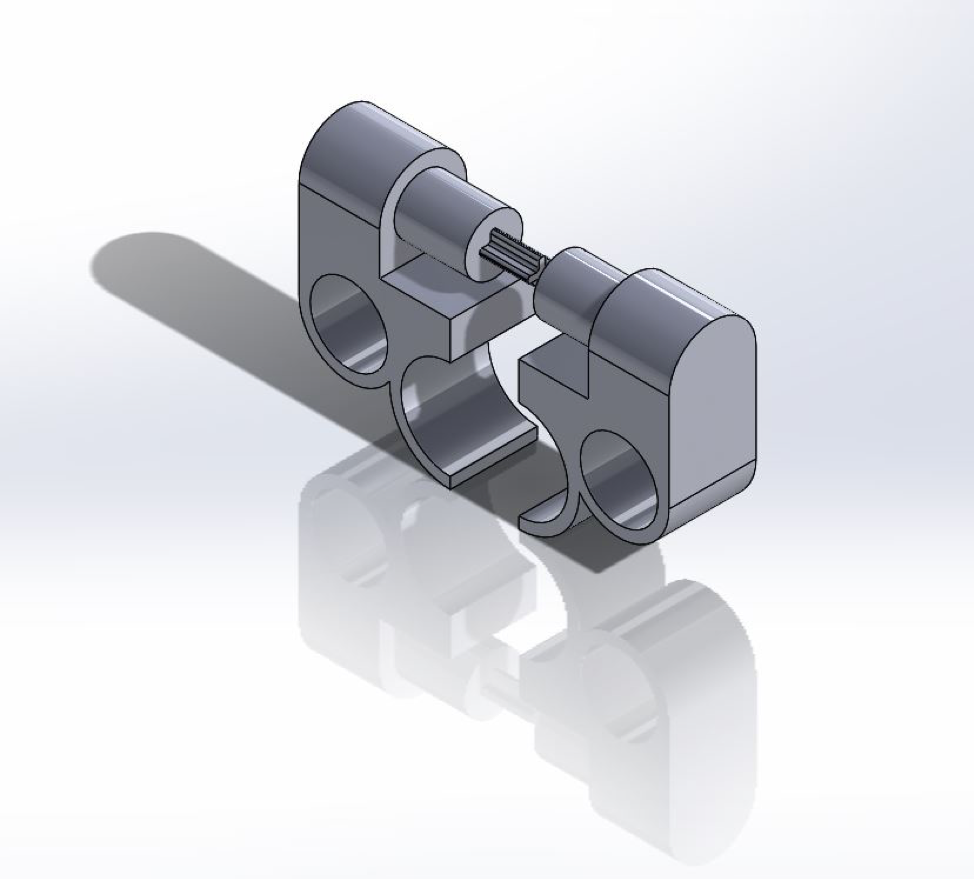
Retractable Drawing Tool
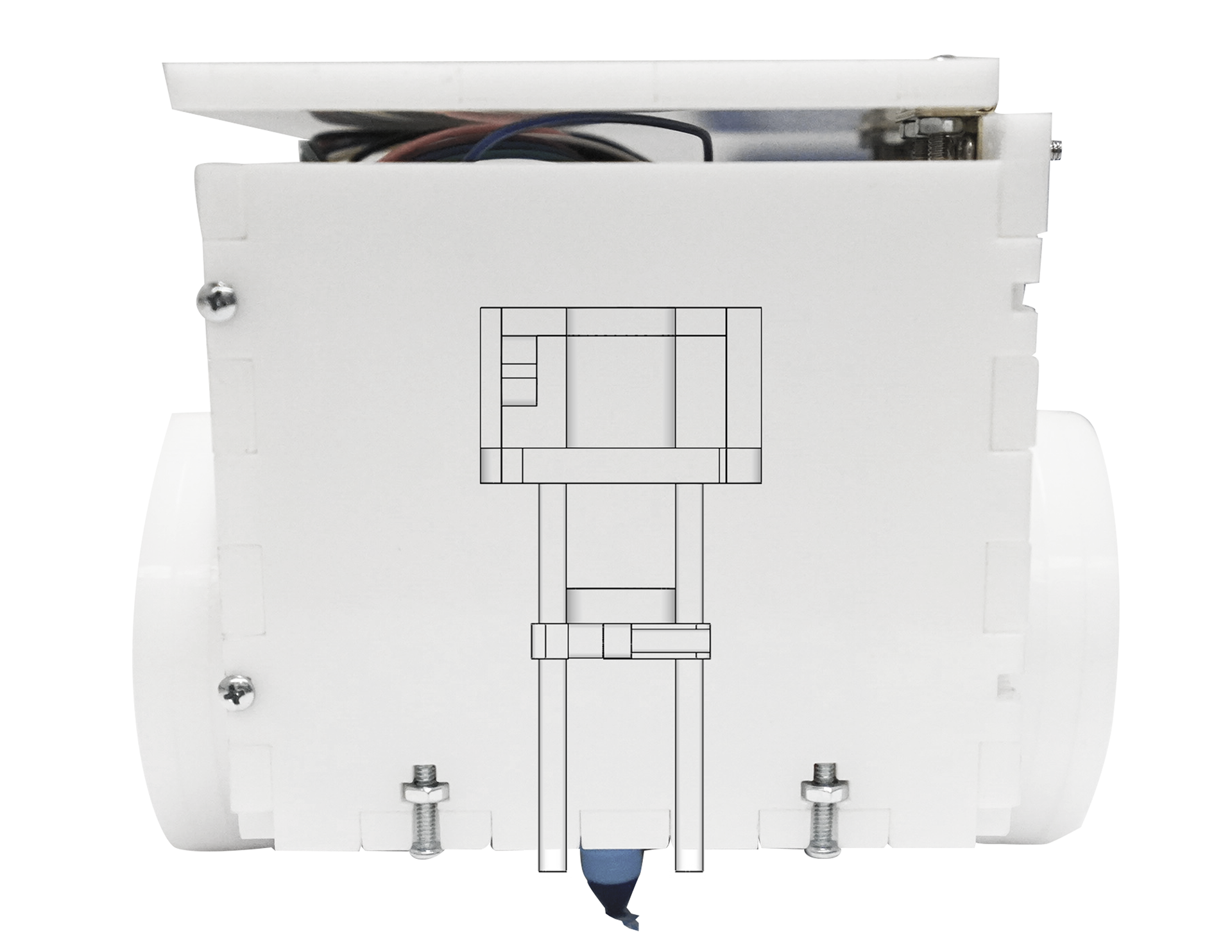
The block will feature a retractable drawing tool. The marker on the inside of the bot lowers down when tracking the number then raises up when the letter is all done.
The whole pen mechanism made by 3D printer. There's a pen holder that holds the marker, which is attached to two rods to hold it in place. The pen holder moves up and down based on an arm that is attached to a gear moved by the servo motor.

Bluetooth Control & Application
Our robot is controlled by a Bluetooth connection. This connection is critical for the bot's movements, because if the bot was attached to the computer and the cord didn't have enough slack, the cord would slightly derail the bot's movements. Therefore, it was critical to establish a Bluetooth connection. The Bluetooth connection utilized a Bluetooth module, and we were able to flash code to the red bear wirelessly through this module. This connection was difficult to establish, but once it was established it worked seamlessly. We analyzed this connection based on how easily and consistently we wirelessly could flash code to the red bear and how well the robot functioned taking input from the mobile device without a cable connection.
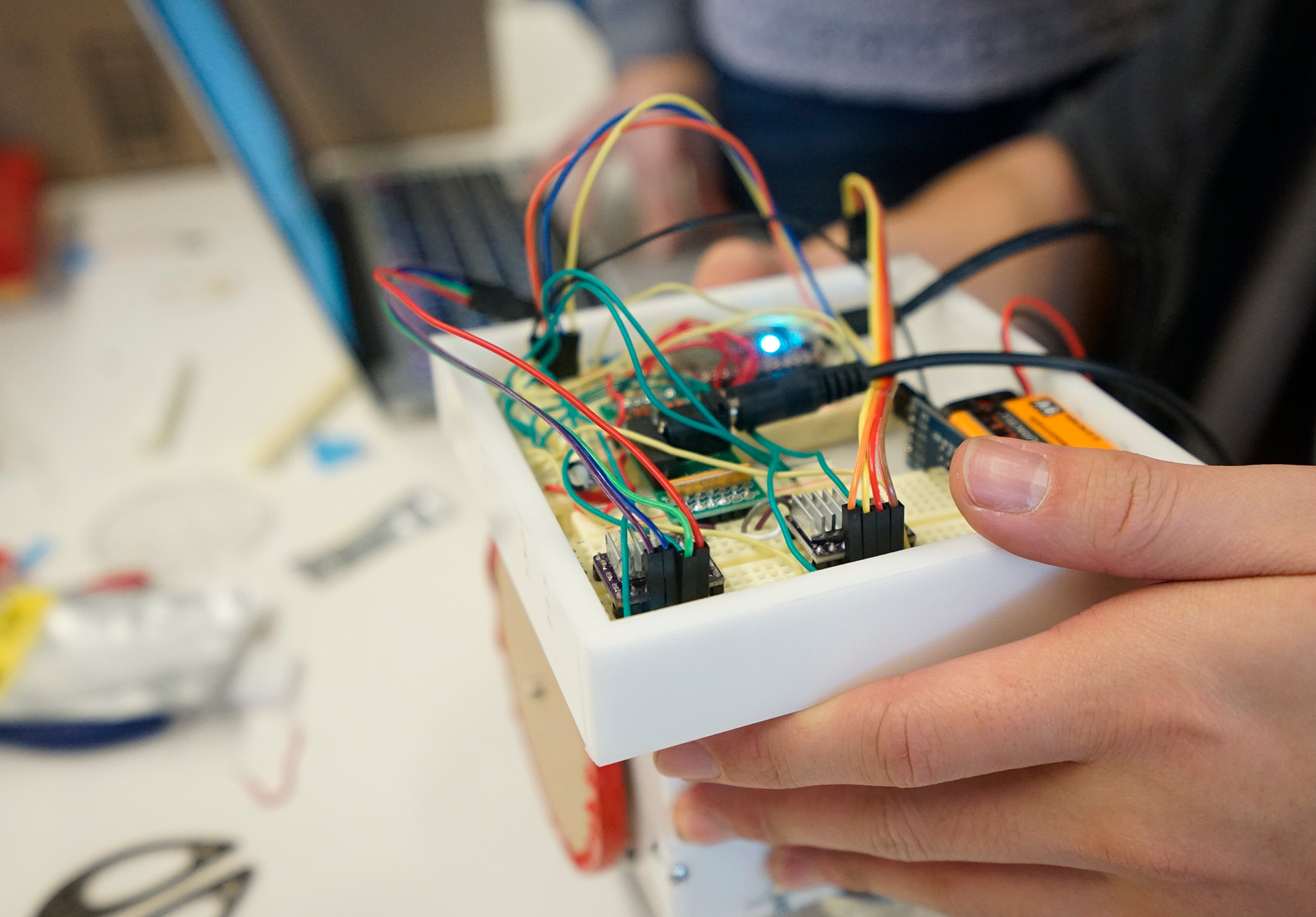
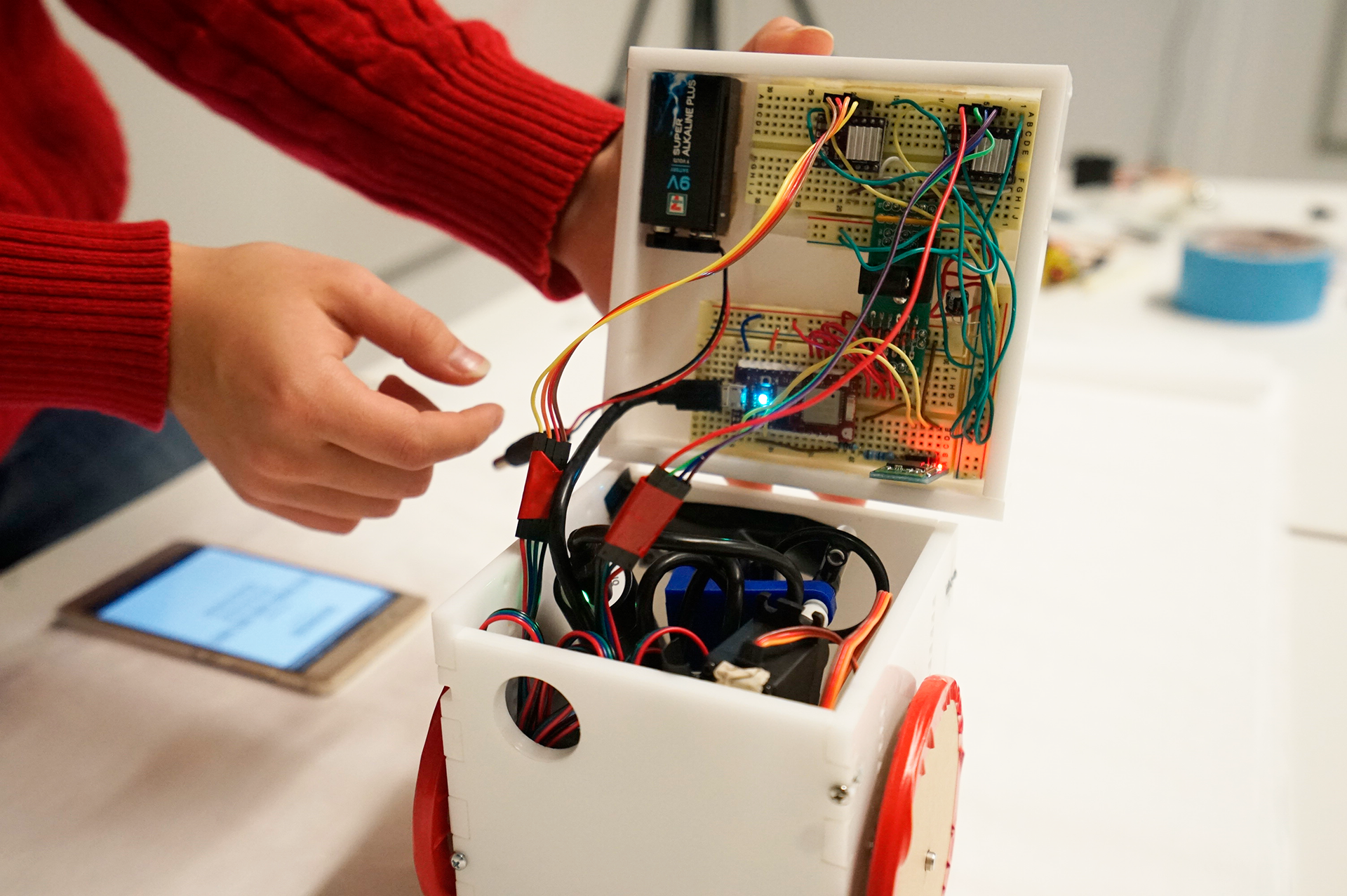
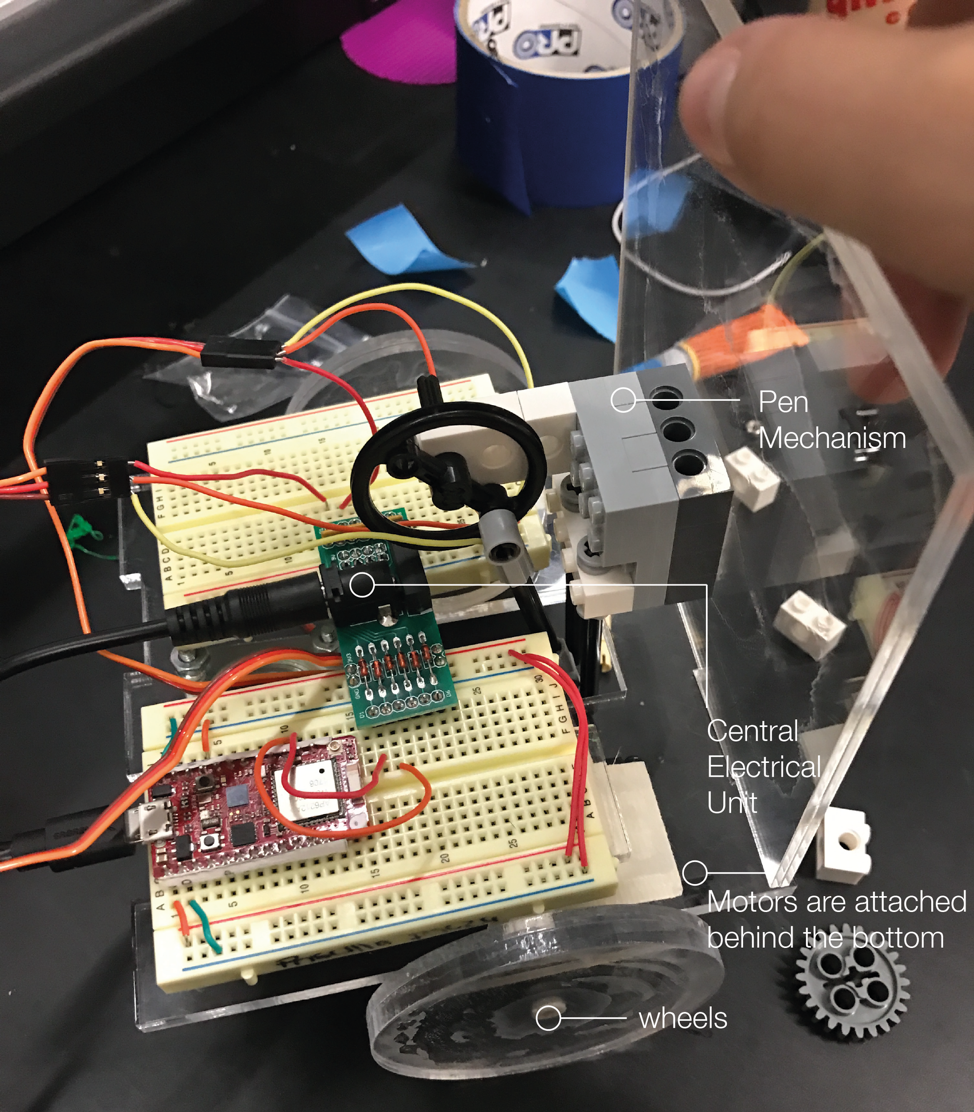
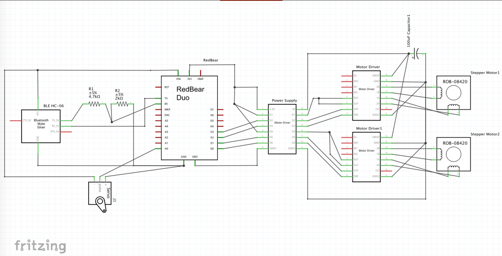
Central Electrical Unit
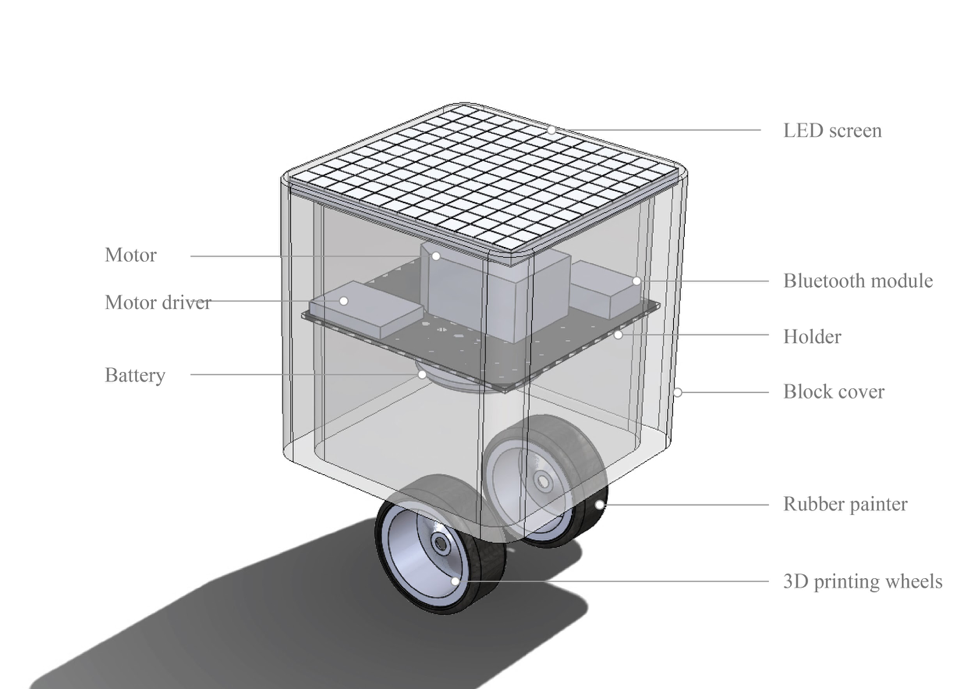
The block has a centralized unit with all of the electrical components necessary to control the block. This will include a mini breadboard, an Red Bear, a Bluetooth module, two motor drivers, and all the wires to connect these units to each other and to the stepper motors that control the wheels and the pen. Based on current technology, the whole happy block can be manufactured in much smaller scale instead the prototype we made.
Motor-Driven Wheels - drawing alphabet
The wheels proved to be a challenging element for us. For the majority of the project, we believed DC motors would work on our bot, but we found that they were too unpredictable and the outlines the bot traced were not discernable as numbers. Ultimately, our goal was for the traced letters to be clearly the intended number. We made code functions for forwards, backwards, 90 degrees left and 90 degrees right. We spent a lot of time trying to fine tune the code to work with the DC motors but ultimately we realized that because the DC motors' function changed drastically based on the power input, we have to switch to stepper motors. The stepper motors produced a much more consistent and accurate tracing of the numbers. At the end, the bot performed to our set standard because it was able to consistently go forwards, backwards, left, and right, and strung together those formed letters.



Our Final Prototype